Project Summary
The Urban Farming project is an entrepreneurial project tasked with examining and solving problems within urban farming technologies to make them more desirable for urban populations. Urban farming is the practice of growing plants within cities, relying on urban space, residents, and city power/water sources to grow and provide for the plants. Urban farming has many benefits for urban populations, including being a local crop source for urban populations, providing clean, green foods to those in lower socio-economic class at low costs, typically not relying on traditional harvest schedule (indoor farms can grow crops year-round), and by cleansing the air in urban areas when the plants undergo photosynthesis. However, urban farming is an underdeveloped area in terms of research and development. Currently, urban farms suffer from high costs, lack of agricultural versatility, high energy/water needs, and implementation difficulties due to lack of architectural versatility. Thus, this project aims to solve the problem of high operating costs by creating a proof-of-concept urban farming system that has lower water and electricity needs than current solutions. The proof-of-concept aims to do this by providing its own water and electricity through collection from renewable resources, creating a system that is completely self-sufficient with limited operating costs. By lowering operational costs, systems scaled upward from this proof-of-concept can be implemented in existing structures in urban areas to grow crops at low costs to provide for growing urban communities.
Project Objective
Design and construct:
A. a hybrid hydroponic system to grow plants while limiting water usage and losses
B. energy generation systems to capture and use environmentally collected energy to power entire hydroponic system without the use of city-provided water and electricity
Manufacturing Design Methods
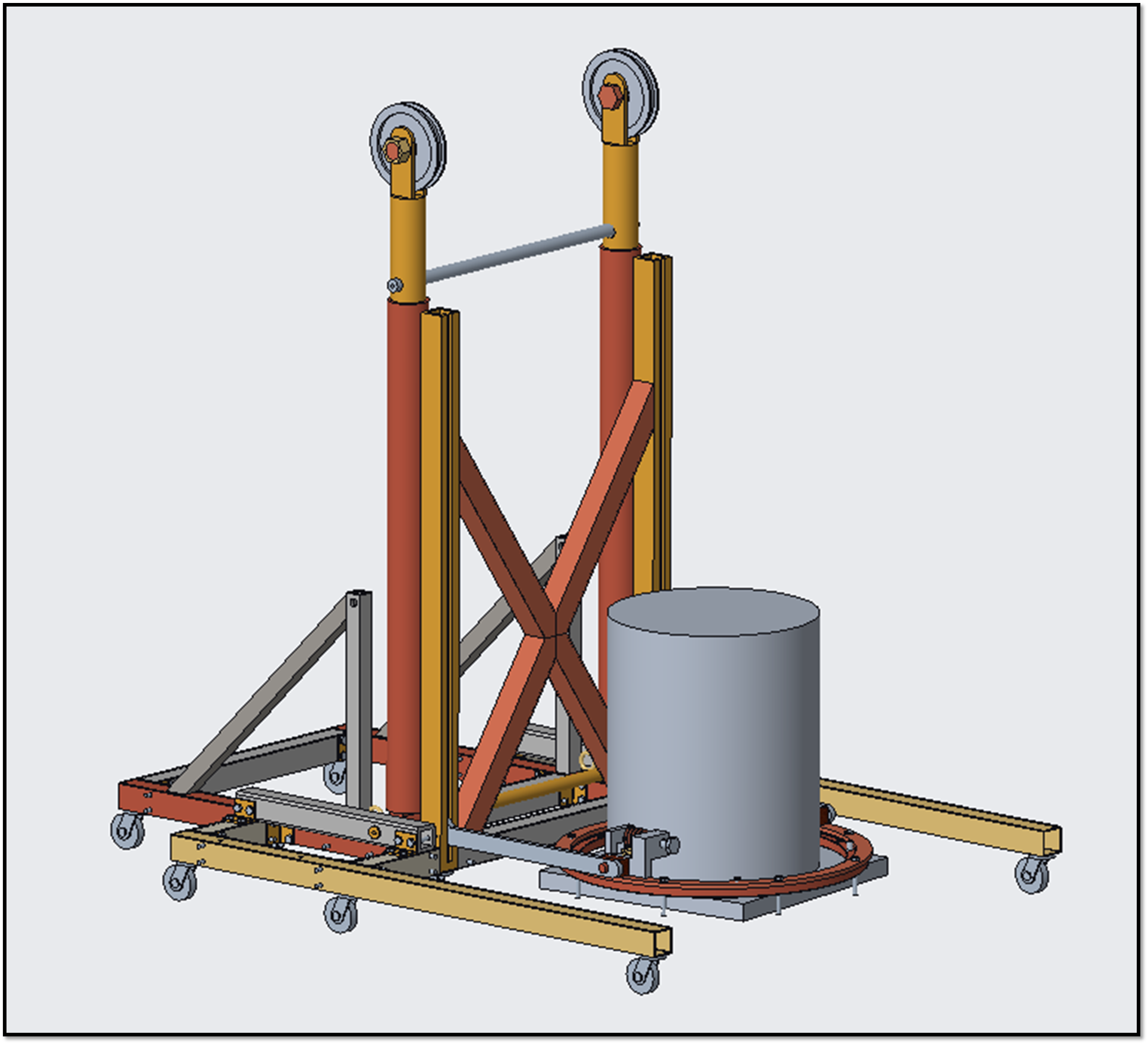
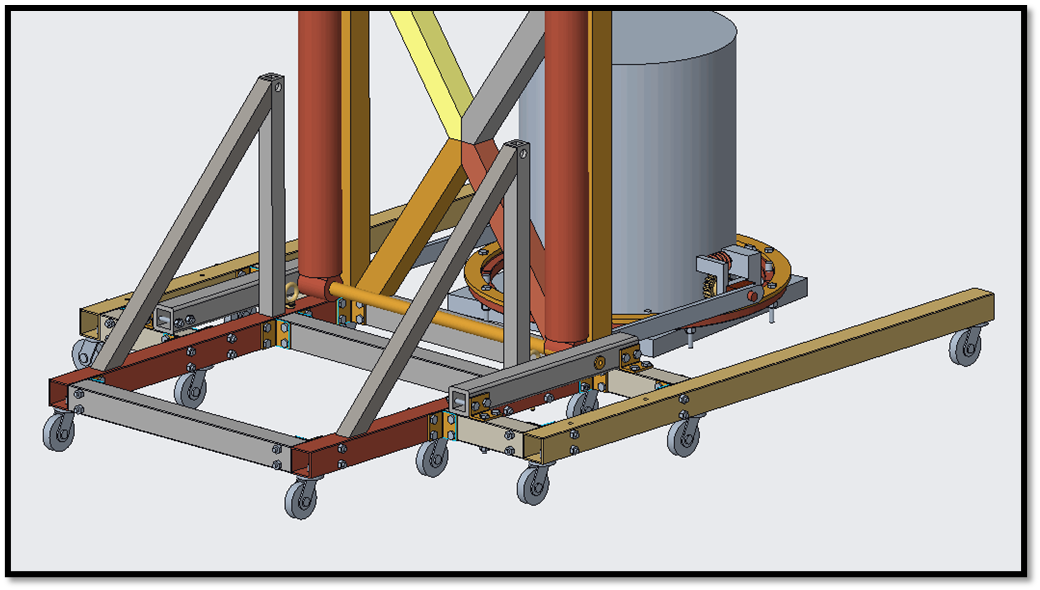
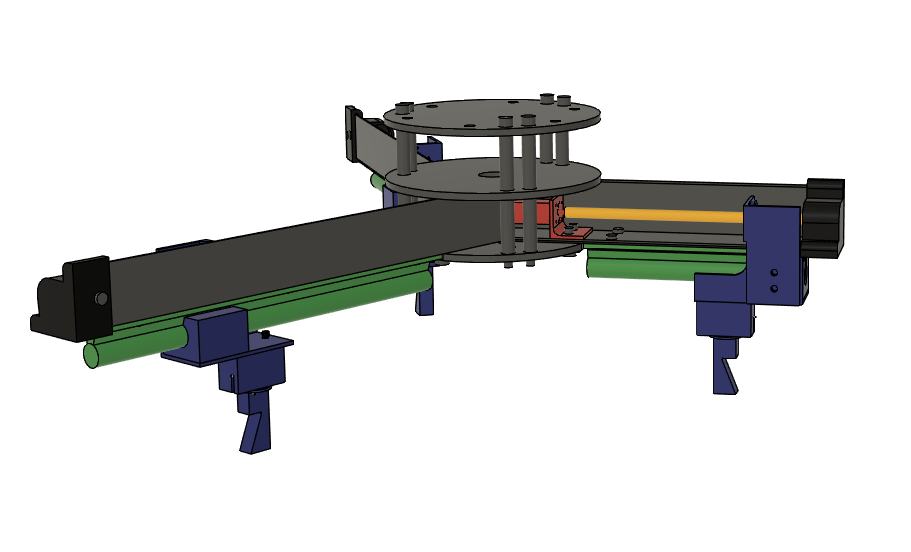
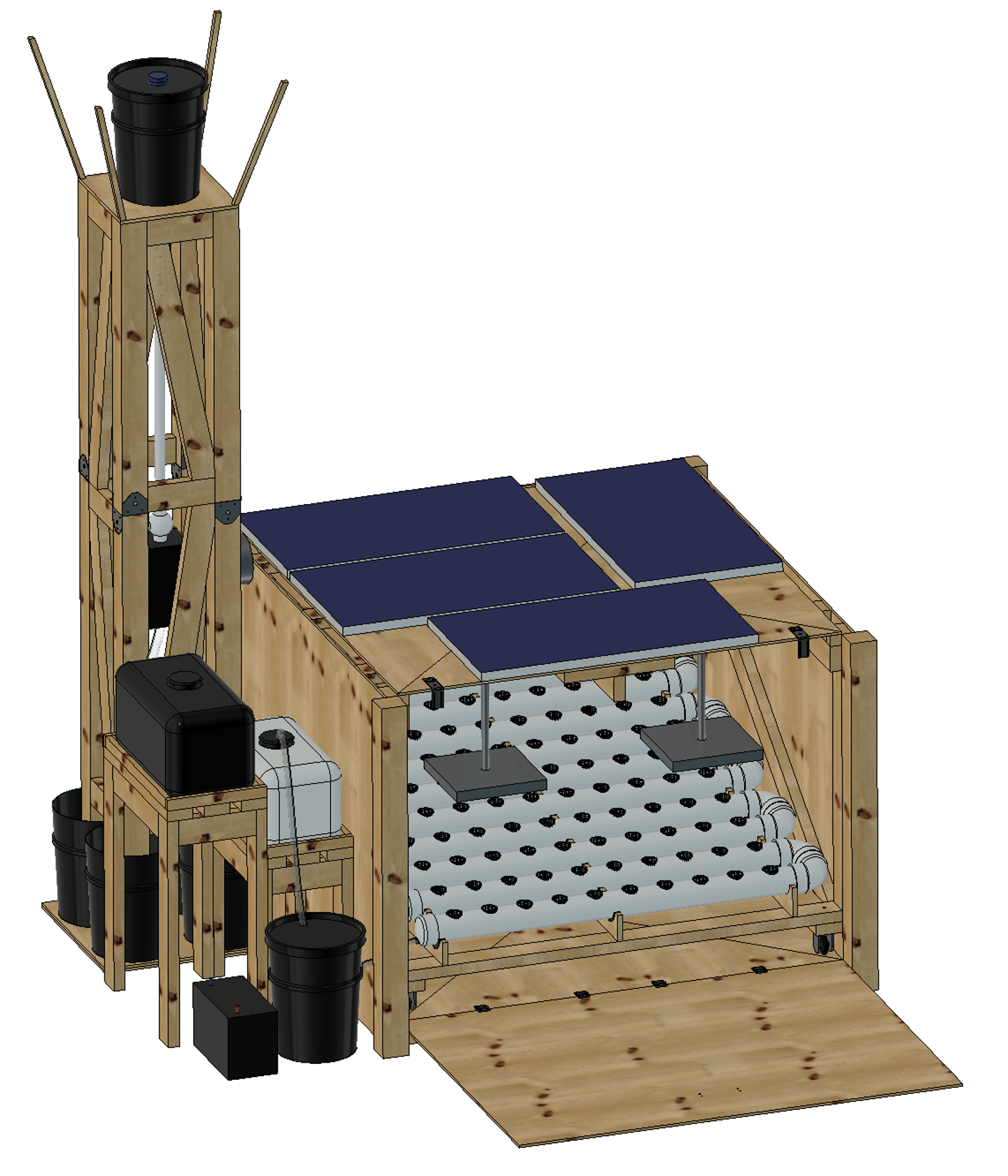
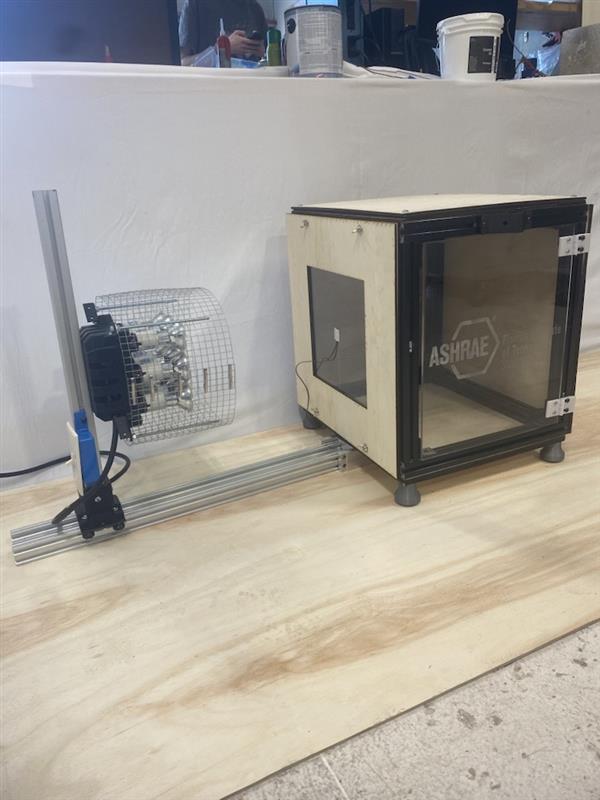
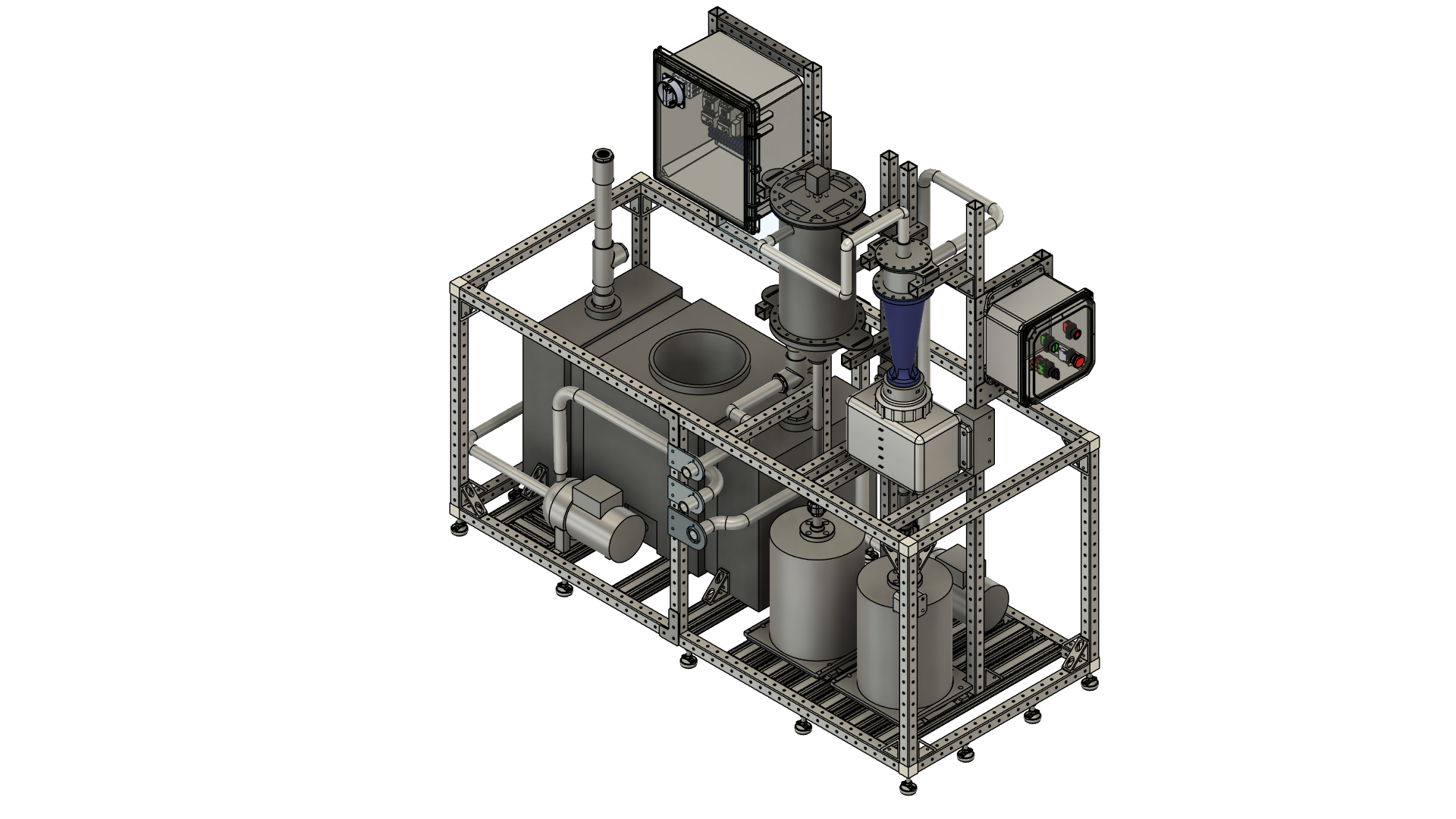
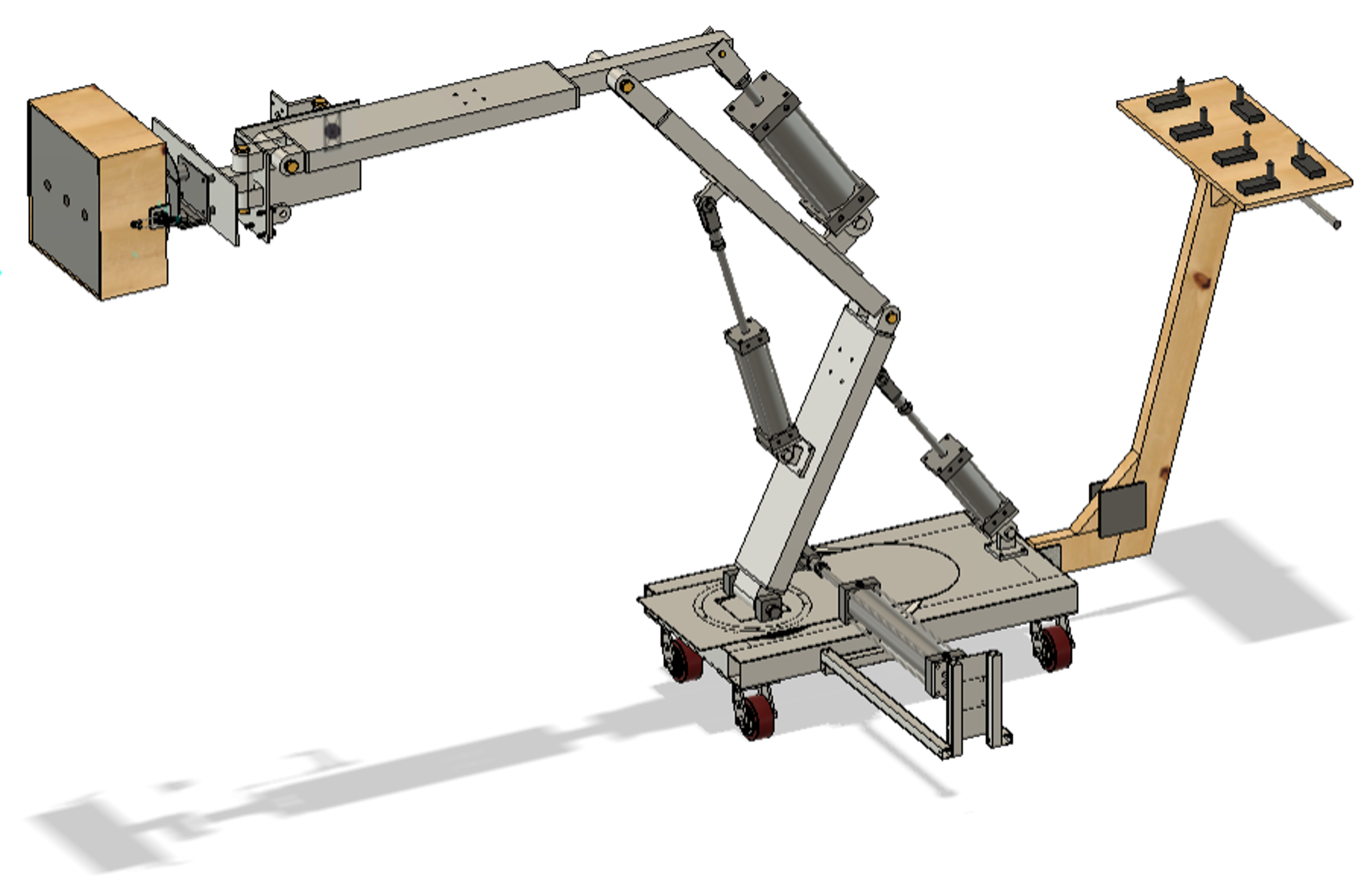
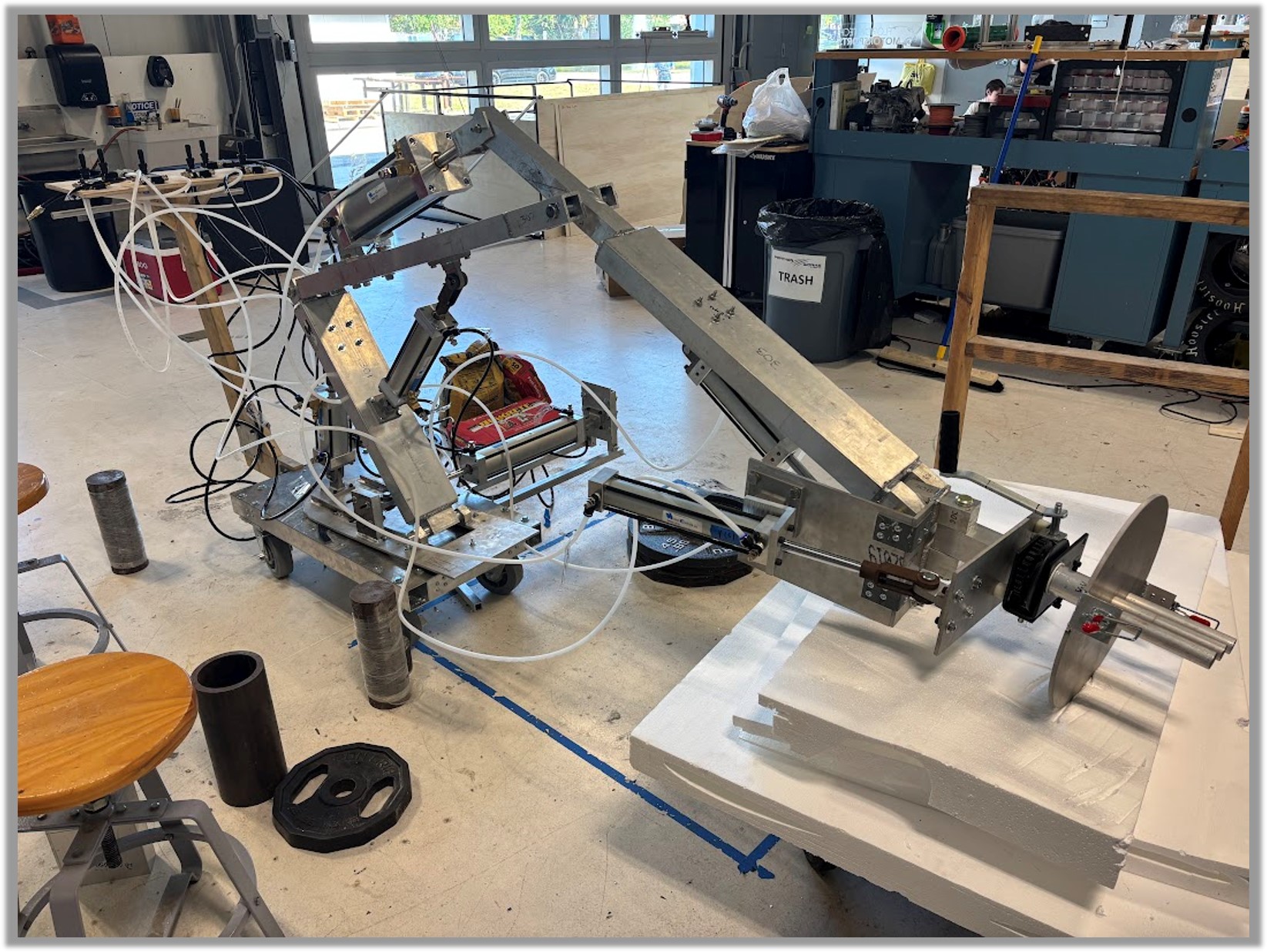
The system was designed in four independent subsystems: the isolation box, hydroponics system, storage tanks/supports subsystem, and water collection tower with two additional subsystems serving as the connections: turbine/filter/piping subsystem and power subsystem. This allowed modular design and construction for ease of transport. The isolation box consists of the warehouse-simulating structure that holds the hydroponics subsystem and components of the power subsystem. When closed, the isolation box becomes a complete box structure that isolates the hydroponics system from the outside as much as possible, but when open, the door folds downwards and serves as a table onto which the hydroponics system can be rolled for ease of planting, harvesting, and maintenance. The hydroponics system is a hybrid hydroponics system, combining components of the ebb and flow and Nutrient Film Technique (NFT) hydroponic techniques. The system relies on gravity to enable water flow, so the system forms a downward zigzag. The long pipes are not angled, while the elbows are at a 10-degree downward angle to allow water flow to the next straight pipe. Inside the end of each of the long pipes is a flow reducing baffle that requires the water from the inlet flows to reach that level before overflowing into the next section. When water leaves the system, it is pumped back into the nutrient tank for recirculation. The system rests atop laser cut plywood supports that were custom cut to hold the PVC pipe. The storage tanks/supports subsystem serves as a connection point between the water collection tower and the hydroponic system. It consists of flexible piping, a 47.5L storage tank, and a 30L nutrient tank. When needed, water from the storage tank can be moved to the nutrient tank by opening the ball valve. The water collection tower serves to collect rainwater to provide water to the hydroponic system. It is the structure that holds the turbine/filter/piping subsystem. The modular system includes two separate components. The lower part of the tower lowers the center of gravity of the tower to limit possibilities of tipping, while the upper part of the tower collects rainwater using a 26-inch x 26-inch funnel. The turbine/filter/piping subsystem consists of a 3D printed turbine, 3D printed/laser cut acrylic turbine housing, and piping. Water from the water collection tower hits the turbine, converting kinetic energy into rotational energy. The power subsystem includes all electrical components within the system. The battery serves as the center of the system. The alternator and solar panels are power inputs to the system and are DC power. The lights and pump are outputs of the system and are AC power. Thus, an inverter is connected to the battery to convert the DC power to AC power. When the turbine spins, the alternator (mated to the turbine shaft) converts the rotational energy from the turbine to electrical energy. The solar panels convert solar energy to electrical energy. The system’s power demand is 1152Wh/day, while power inputs generate an average of 1872Wh/day. Thus, the system is self-sustaining during normal operation. The battery has a storage capacity of 1280Wh, allowing the system to run for 26.67 hours without power input, providing a backup system in case the daily collected power is less than the required output power. In case of emergency, the system can be hooked up to city power if its integral subsystems are incapable of generating power.
Specification
Dimensions:
Largest Dimensions: 91.35 in x 108.50 in x 119.25 in
Subsystem Dimensions:
Isolation Box (door open): 67.00 in x 108.50 in x 49.59 in
Hydroponics System: 59.51 in x 60 in x 23.00 in
Storage Tanks/Supports: 32.13 in x 60.51 in x 45.40 in
Water Collection Tower: 26.00 in x 26.00 in x 119.25 in
Water Specifications:
Upper Water Storage Capacity: 18.93 L
Storage Tank Capacity: 47.50 L
Nutrient Tank Capacity: 30.00 L
Hydroponic System Capacity: 8.745 L
Pump Tank Capacity: 9.00 L
Plant Specifications:
Plant Selection: Cilantro
Plant Slots: 100
Plants Per Slot: 3
Growth Time Until Maturity: 35 days
Growth Time Until Harvest as Coriander: 55 days
Yearly Nutrient Specifications:
FloraGro: 1.538 L
FloraBloom: 0.384 L
FloraMicro: 0.7689 L
Costs:
Construction Cost: $2216.00
Operating Cost: $98.75/year
Analysis
All structural components of this project were analyzed in ANSYS Workbench to ensure that they could support typical outside forces, such as heavy rain, wind, and snow. Both the isolation box and water collection tower had a factor of safety of 15, meaning that even in the event of unnatural outdoor weather, the structures would survive with minimal danger. To determine the theoretical output for the system’s solar panels, System Advisor Model (SAM) was used. This model used Orlando’s weather data to determine average power production in various months of the year as well as a total yearly power production of 166 kWh per solar panel. To determine power output of the turbine per 5-gallon bucket fill, an excel spreadsheet was used that calculated the power output for various drop heights and turbine locations. This allowed the optimal turbine location and drop height to be determined within the project’s height limitation. Furthermore, these calculations proved that the amount of energy gained from the turbine is directly proportional to the volume of the building on which the system is mounted, while the energy gained from the solar panels is directly proportional to the surface area of the roof onto which they are mounted. Thus, larger buildings benefit more smaller buildings from this system. Lastly, energy calculations were completed to prove that with the average inputs from the solar panels and the turbine, the lights and pump can operate completely independent from the city power grid. The analysis shows that the system effectively lowers the operating cost of the system to around 98.75 dollars per year —where the only costs come from seeds and nutrients.
Future Works
Various avenues of future work are possible for this project. Firstly, to further improve the energy collection components, the design and implementation of solar tracking sensors will allow the solar panels to follow the sun. The implementation of trackers will maximize the solar energy received by the panels, increasing the amount of power production per panel. Furthermore, automation controls could be added throughout the system. Automatic drainage sensors can be added to the upper water tank when it is full, so that a human does not have to manually turn the ball valve to cause water to flow. Secondly, automatic nutrient addition systems could be added to sense the nutrient composition of the water so that nutrients can be added as needed. This would eliminate the need for daily water quality testing and allow early detection of possible plant illnesses. Further testing of the system could also be conducted with various other plant species being grown instead of just cilantro. Growing other species would prove the versatility of the system. Lastly, a large-scale system could be created in an existing building to prove that the integration of the system into an existing building would work and provide food to an urban community.
Acknowledgement
Special thanks to Graduate Student Assistants Junot Damen and André Robidoux, the faculty advisors, L3HSDC staff, and Operations Lab Managers, without whom this project could not have been completed.


{kind=link}
{kind=link}