Project Summary
Project Vulcan aims to advance propulsion technology by developing a proof-of-concept metal 3D-printed clustered aerospike engine featuring an integrated Liquid-Injected Thrust Vector Control (LITVC) system. Aerospike engines, known for their unique altitude compensation properties, offer theoretical efficiency across varying altitudes, potentially outperforming traditional bell nozzles. The addition of an LITVC system promises enhanced control, making this a significant contribution to propulsion technology.
Project Vulcan is developed in partnership with Vaya Space, aligning with their small launch vehicle, Dauntless, designed for cost-effective space access. Vaya Space focuses on sustainable and affordable launch solutions, particularly in the small satellite market. This collaboration provides Project Vulcan with practical relevance, placing it within the context of industry developments and directly supporting applications in commercial and research satellite launches.
Through this effort, we aim to gain insights into the feasibility, performance, and optimization of the LITVC system, enhancing future designs and implementation strategies. Our objectives include designing, constructing, and validating an aerospike engine through static fire testing with solid rocket motors. The project will use iterative additive manufacturing, a custom-built test stand, an altitude-simulating shroud, and a tunable Ansys model to optimize performance, streamline virtual testing, and reduce the need for physical prototypes.
Safety is prioritized in alignment with Vaya Space’s protocols, ensuring risk mitigation during testing. By the end of the academic year, Project Vulcan will deliver a validated prototype with comprehensive data, contributing valuable insights to next-generation propulsion systems.
Project Objective
The objectives of Project Vulcan center on validating the performance, manufacturability, and control capabilities of a clustered aerospike engine with integrated LITVC. The aerospike shall withstand a 3-second static fire test using solid rocket motors to simulate real-world flow conditions, ensuring aerodynamic efficiency and structural durability under operational stress. It shall be fabricated using additive manufacturing technologies to take advantage of intricate design fidelity, rapid prototyping, and optimized structural performance.
The aerospike must be fully compatible with the custom-designed test stand to streamline integration and minimize the need for adjustments during testing. Additionally, an altitude-simulating shroud shall be designed and fabricated to interface with the aerospike system, enabling accurate performance assessment across a range of atmospheric conditions.
Finally, the aerospike shall incorporate a Liquid-Injected Thrust Vector Control (LITVC) system, allowing precise thrust vectoring through liquid injection into the exhaust flow and expanding control authority over the engine’s performance envelope.
Manufacturing Design Methods
Due to the complexity of the aerospike geometry, advanced manufacturing methods needed to be applied to account for the interior cooling lines. To enable this, laser-powder bed fusion (LPBF) was selected as the optimal manufacturing method. LPBF is a metal printing technique that uses lasers to melt layers of microscopically thin material.
To ensure that the aerospike design could be manufactured successfully, certain requirements were set in place. This included having a minimum 45º angle to reduce the need for support structures, a teardrop shape for any interior cooling lines that were originally circular, once again to minimize the need for support structures. The final requirement was ensuring a minimum 2 mm thickness throughout the geometry. This is to ensure proper metal fusion and reduce the chances of warping with each added layer.
To prepare the aerospike geometry for the high-stress thermal environments, both thermally and in the context of the expected high pressure, a heat treatment was done to set the internal crystal structure to the right specifications. The material of choice was AlSi10Mg. This was chosen due to its high thermal conductivity as well as its price. The selected manufacturer was MIMO Technik, a 3D metal printing company that specialized in LPBF.
Specification
Metal 3D-Printed Aerospike:
The metal 3D-printed radial aerospike engine represents a complex integration of advanced manufacturing, fluid dynamics, structural resilience, and data acquisition, culminating in a system designed for high-temperature, high-pressure static fire testing. The system-level components have been carefully developed to ensure a seamless and controlled testing environment at the Vaya Space facilities.
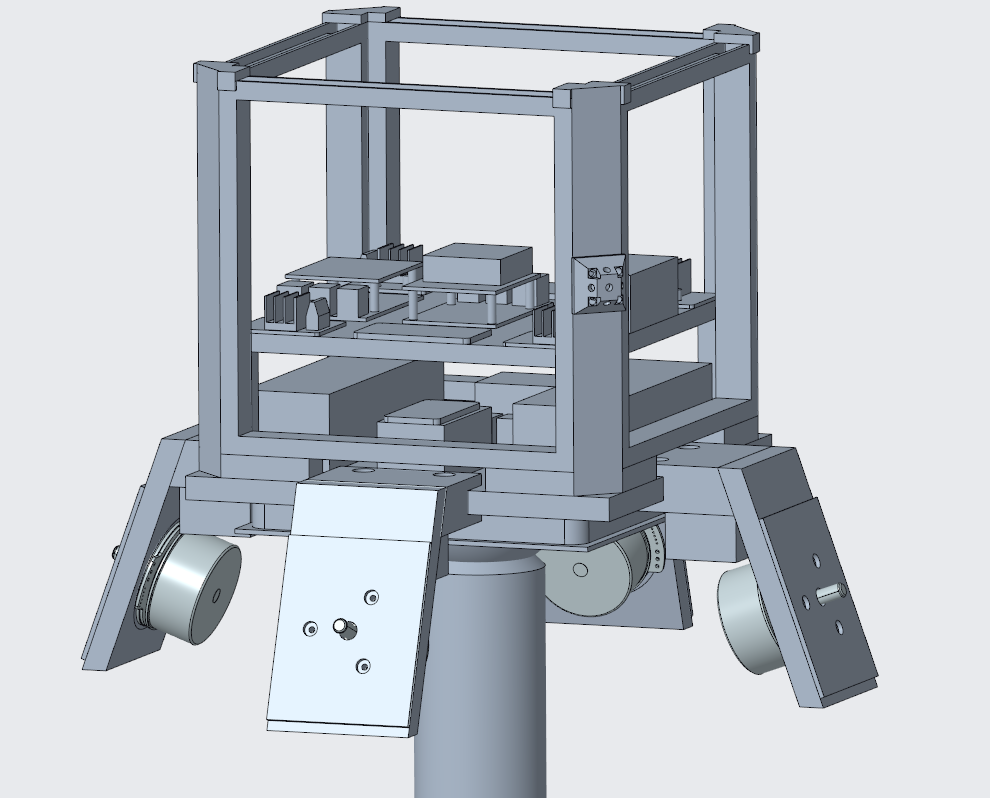
Test Stand:
The custom-built test stand replicates a Stewart Platform and serves as the structural foundation for the aerospike engine, securing it against thrust forces up to 1.5 kN. The stand incorporates two steel plates, clevis brackets, spherical brackets, and load cells, ensuring accurate force measurement and stability. Two rings of M12 and M10 bolts are used to secure the model flange to the test stand for maximum structural integrity. The base is then bolted to the concrete floor at the Vaya Space test site during firings to ensure secure stabilization. The test stand was specifically designed to take measurements in 6 degrees of freedom (DOF). This is done to avoid constructing two different test stands for thrust and LITVC.
Altitude Simulation Shroud:
An altitude-simulating shroud compatible with the aerospike design will be placed around the nozzle. This shroud will create controlled localized pressure drop, simulating ambient atmospheric conditions experienced at various altitudes during a rocket launch. Thrust and pressure data will be recorded to validate the performance of the shroud and to evaluate how the aerospike performs under reduced ambient pressure, assessing its altitude-compensating efficiency.
Analysis
The team utilized engineering tools and methods to validate the propulsion system and ensure the desired performance and survivability of the system. Computational Fluid Dynamics (CFD) simulations in ANSYS Fluent were employed to analyze flow behavior and predict pressure and thermal loads on the nozzle. Thermal survivability of the structure was verified using a combination of heat transfer data extracted from custom field functions written in Fluent and MATLAB-based heat transfer coefficient calculations. These coefficients were then applied in ANSYS Structural for a comprehensive thermal analysis. Subsequent structural simulations incorporated both thermal and pressure boundary conditions to confirm the system's integrity under expected operating conditions. The cooling system, critical to the survivability of the aerospike, was analyzed through a combination of MATLAB and CFD in Fluent to determine pressure losses and the required flow rate necessary to sustain effective heat removal.
The altitude-simulating shroud design incorporated pressure analyses using two methods: MATLAB-based calculations and Fluent CFD simulations. MATLAB employed simplified isentropic flow equations, combining nozzle throats into a single equivalent throat and predicting an internal pressure of approximately 6,334 Pa. In contrast, Fluent CFD simulations realistically modeled the geometry, capturing complex flow behaviors and interactions between individual nozzles, resulting in a higher internal pressure prediction of about 10,000 Pa. The 44.9% discrepancy between MATLAB and Fluent primarily arose from MATLAB's assumptions of ideal, frictionless, and isentropic conditions, and its simplification of multiple nozzles into one. Consequently, Fluent's higher predicted pressure was adopted as the simulated altitude condition.
Future Works
With more time and resources, we’d implement a hybrid system akin to Vaya Space to better mimic their system to fortify LITVC performance at a smaller scale in their architecture.
Other Information
LinkedIn Page: linkedin.com/in/projectvulcan
Instagram Page: https://www.instagram.com/project_vulcan_floridatech?igsh=MTB0NWVlMnNieG96aw==
Acknowledgement
We would like to acknowledge the generous support of our sponsors: Educate the Children Foundation, MIMO Technik, Panther Works, Solideon, and Vaya Space.
We extend our sincere thanks to our capstone coaches—Brooks Kimmel, Kineo Wallace, and Carson Zide—for their guidance throughout the project.
We also wish to recognize the invaluable contributions of Florida Tech faculty members Felix Gabriel, Niall Harris, Dr. Firat Irmak, Dr. Daniel Kirk, Dr. Ilya Mingareev, Dr. Hamidreza Najafi, and Dr. Eric Swenson for their expertise and continued support.